在《點算的奧秘:齊次遞歸關係的解》中,筆者指出「齊次遞歸關係」的「輔助方程」的解有三種可能性:(1)全部根均為各不相同的「實根」;(2)全部根均為「實根」,但有部分根為「重根」;(3)全部或部分根為「複根」。在該節筆者已討論了上述第(1)和(2)兩種情況,在本節筆者將討論第(3)種情況,即含複數解的「遞歸關係」。但在討論這種「遞歸關係」前,須先介紹有關「複數」的基本知識。
在歷史上,「複數」(Complex Number)的發現乃導因於求解「一元二次方程」。我們知道對於「一元二次方程」ax2 + bx + c = 0 (其中a ≠ 0),其「根」可用下式求得:
在上式中,b2 − 4ac稱為「二次方程」的「判別式」(Discriminant),一般記作Δ,可據以判定上述「二次方程」含有哪一類型的根。當Δ為負數時,由於任何實數的平方都不可能是負數,上述「二次方程」不可能有「實根」。因此如要「二次方程」在任何情況下都有根,我們必須擴大數系。十分有趣的是,我們只需定義一個新的數i = √(−1)(稱為「虛數單位」Imaginary Unit),便可處理所有負數的平方根,這是因為任何負數都可表達為−1的實數倍數,而且√(ab) = √a × √b。舉例說,
我們把以上這種數稱為「純虛數」(Pure Imaginary Number)。假如我們把一個「實數」與一個「純虛數」相加,便得到一個「複數」,例如−2 + √3i、5 − 4i等都是「複數」的例子。事實上,我們可以把任何「複數」寫成以下一般形式:
由於實數a和「純虛數」bi可以分別看成a + 0i和0 + bi,實數和「純虛數」都只是「複數」的特例。
這樣任給一個「二次方程」,我們都可計算出它的根。試看以下例題。
例題1:試求以下「二次方程」的根:
答1:利用公式(1),求得
| x | = [2 ± √(22 − 4 × 1 × 4)] / (2 × 1) |
| = [2 ± √(−12)] / 2 | |
| = [2 ± 2√3i] / 2 | |
| = 1 ± √3i □ |
最初人們對「複數」有一種抗拒感,因為難以在現實世界中找到「複數」所代表的數量。後來有人用幾何方法解釋「複數」,把「複數」a + bi對應於平面上的點(a, b)。由於實數對應著數軸上的點,而表達數軸上的點只需一個「坐標」,因此實數可被理解為一種「一元數」;而「複數」對應著平面上的點,而表達平面上的點需用兩個「坐標」,因此「複數」可被視為一種「二元數」。這樣,實數與「複數」的區別就只在於後者比前者多了一個「坐標」,因此「複數」便不那麼神秘了。
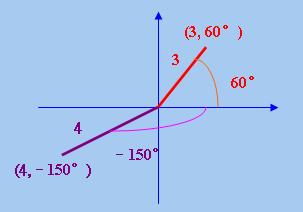
把「複數」幾何化為我們提供了表達「複數」的更多方法。我們知道平面上的點除了可用「笛卡爾坐標」(即「平面直角坐標」)表達外,還可以用「極坐標」表達。平面上一點的「極坐標」由兩個實數組成,第一個數是該點與「原點」之間的距離,可用r表示;第二個數則是該點與「原點」的連線與正x軸所成的夾角,可用θ表示。這個角度須表達為區間]−180°, 180°]上的某個實數(註2),若該點位於第一、二象限,角度取正值(即從正x軸按逆時針方向量度);若該點位於第三、四象限,角度取負值(即從正x軸按順時針方向量度)。例如下圖便顯示「極坐標」為(3, 60°)和(4, −150°)的兩點:
由於有兩種坐標表達法:「笛卡爾坐標」(x, y)和「極坐標」(r, θ),我們須找出這兩種坐標之間的轉換公式。試看下圖:
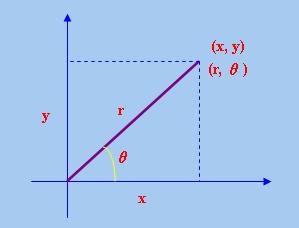
利用「畢達哥拉斯定理」和「三角函數」的定義,不難從上圖總結出(x, y)與(r, θ)之間的轉換公式:
上式中的tan−1代表三角函數tan的逆運算,但須注意由於tan不是「一對一函數」,同一個實數r可有無限多個tan−1(r),因此我們須根據x和y所在的象限把tan−1(y/x)表達為區間]−180°, 180°]上的某個角度。有了以上的轉換公式,我們便可以把任一複數寫成以下兩種形式(等號左端可稱為「笛卡爾坐標」形式,右端為「極坐標」形式):
我們把一對形式為x + iy和x − y的複數稱為「共軛(Conjugate)複數」。由於√(x2 + y2) = √(x2 + (−y)2),因此一對「共軛複數」應具有相同的r坐標。另外,容易看到,由於點(x, y)和(x, −y)關於x軸對稱(即這兩點與原點的連線與x軸的夾角具有相等的絕對值,但方向相反),在取值範圍為]−180°, 180°]的條件下,一對「共軛複數」的θ坐標應具有相同的絕對值,但符號相反。應用「三角恆等式」cos(−θ) = cosθ和sin(−θ) = −sin(θ),我們可以把一對「共軛複數」的兩種坐標形式寫為
例題2:試把複數z1 = 1 + √3i和z2 = 1 − √3i寫成「極坐標」形式。
答2:我們先求z1的r坐標和θ坐標。這裡x = 1,y = √3,即(x, y)位於第一象限,因此θ應取正值。根據公式(2),
因此
接著考慮z2。由於z2與z1是一對「共軛複數」,根據以上討論,我們無需計算便知道
除了以上內容,我們還需要以下的定理1 (棣美弗定理De Moivre's Theorem):
定理1:
有了以上的預備知識,我們便可以研究如何求解含複數解的「遞歸關係」。根據「方程式論」(Theory of Equations),一條其系數全為實數的多項式方程如果有複數解,則其複數解的個數必為偶數,而且必定以「共軛複數」的形式出現。因此為簡化討論,我們首先考慮只含有一對「共軛複數」解的「齊次遞歸關係」,即該「遞歸關係」的「輔助方程」的解為x + iy和x − y。本來根據上兩節,該「遞歸關係」的「通解」為
可是為了避免展開二項式,我們把上述「共軛複數」解改寫為「極坐標形式」r (cosθ + i sinθ)和r (cosθ − i sinθ)。這樣,上面的「通解」便變為
| an | = C1 × [r (cosθ + i sinθ)]n + C2 × [r (cosθ − i sinθ)]n |
| = C1rn [cos(nθ) + i sin(nθ)] + C2rn [cos(nθ) − i sin(nθ)] (定理1) | |
| = (C1 + C2) × rncos(nθ) + i(C1 − C2) × rnsin(nθ) |
由於C1和C2是「任意常數」而i是常數,C1 + C2和i(C1 − C2)仍是「任意常數」,因此不妨分別用D1和D2代替。這樣,上面的「通解」便可以寫為
把給定的初值代入上式,便可以解出D1和D2,從而得出「遞歸關係」的「特解」。
例題3:求解下列「遞歸關係」,並且驗證本題答案與用下列「遞歸關係」求得的a2和a3的值相符:
| an = 2an−1 − 4an−2,若n > 1 |
| a0 = 1,a1 = 4 |
答3:把給定的「遞歸關係」改寫為標準形式:
因此本題的「輔助方程」為
此即上面例題1的「二次方程」。根據該題的解答,上式有一對「共軛複數」解:1 + √3i和1 − √3i。根據例題2的解答,我們可以把這對「共軛複數」改寫為以下「極坐標」形式:2 (cos60° + i sin60°)和2 (cos60° − i sin60°)。把r = 2和θ = 60°代入上面的算式(3),便可得到本題的「通解」為
接著把給定的「初值」代入上式,便得到
| a0 = 20 × [D1cos(0 × 60°) + D2sin(0 × 60°)] |
| 即,D1 = 1 |
| a1 = 21 × [D1cos(1 × 60°) + D2sin(1 × 60°)] |
| 即,D1 + √3 D2 = 4 |
容易求得上述聯立方程的解為D1 = 1,D2 = √3。因此本題的「特解」為
為了驗證答案,我們首先用上式直接求a2和a3的值:
接著我們又用上述「遞歸關係」和「初值」分別求a2和a3的值:
上述兩種方法的計算結果相符。□
如果「遞歸關係」的「輔助方程」含有多對「共軛複數」解,或者含有其他實數解,則只需結合上兩節以及本節介紹的方法,便可寫出該「遞歸關係」的「通解」。試看以下例題。
例題4:求解下列「遞歸關係」,並且驗證本題答案與用下列「遞歸關係」求得的a3和a4的值相符:
| an = 2an−1 − an−2 + 2an−3,若n > 2 |
| a0 = 1,a1 = 4,a2 = 4 |
答4:把給定的「遞歸關係」改寫為標準形式:
因此本題的「輔助方程」為
容易驗證可以把上式因式分解為
上式的三個解為2、i和−i。由於i和−i對應於平面上的點(0, 1)和(0, −1),容易看到這對「共軛複數」與原點的連線的長度均為1,而該兩條連線與x軸的夾角分別為90°和−90°,所以這對「共軛複數」的「極坐標」形式為cos90° + i sin90°和cos90° − i sin90°。因此本題的「通解」為
接著把給定的「初值」代入上式,便得到
| a0 = A × 20 + B × cos(0 × 90°) + C × sin(0 × 90°) |
| 即,A + B = 1 |
| a1 = A × 21 + B × cos(1 × 90°) + C × sin(1 × 90°) |
| 即,2A + C = 4 |
| a2 = A × 22 + B × cos(2 × 90°) + C × sin(2 × 90°) |
| 即,4A − B = 4 |
容易求得上述聯立方程的解為A = 1,B = 0,C = 2。因此本題的「特解」為
為了驗證答案,我們首先用上式直接求a3和a4的值:
接著我們又用上述「遞歸關係」和「初值」分別求a3和a4的值:
上述兩種方法的計算結果相符。□
以上我們討論了含複數解的「齊次遞歸關係」的解題方法。理論上,我們也能結合上節和本節介紹的方法求解含複數解的「非齊次遞歸關係」(特別是「非齊次部分」包含三角函數的「非齊次遞歸關係」),但這將牽涉更複雜的計算,需要用到更多有關「三角恆等式」的知識,所以本文不予介紹。


